- About
- Social Media
- Team Peryton Heron, Grand Champions 2022
- 2022 Team Peryton Atlantis
- We’re Working With
- Sponsors
- Previous entries
About
We are a group of students based at the University of Surrey consisting of teams focused on competing in the annual IMechE UAS challenge, which sees university teams enter from all over the world. Having won the competition in 2022 and 2021 we have strong experience producing capable autonomous UAV solutions.
You can contact us at teamperyton@surrey.ac.uk
Social Media
![]()
![]()
![]()
![]()

Team Peryton Heron, Grand Champions 2022
Team Peryton Heron were awarded Grand Champions 2022 at the IMechE UAS challenge, facing 13 international teams at the live competition, as well as gaining the Safety award. This was as a result of performing 2 99% autonomous missions, including successful payload drops.

from left to right, IMechE President Phil Peel, Oliver Gent, Jonathan Foster, Pierre Semichon, Thanraj Virdee, Owen Wastell.

Consisting of the remaining 4th year Aria 2021 team as well as students from all years and degrees across the university. We’re building upon our previous success and learning, pushing boundaries across all sub-systems.
- We’ve created a single propeller pusher to increase propulsion efficiency, reducing propulsion system and battery mass;
- We’re using custom composite parts to maximise part strength to weight ratio, while using environmentally friendly flax weave to reduce environmental impact;
- We’ve reduced our core avionics costs by over 50% compared to last year, using custom electronics and software as well as optimising COTS purchases;
- We’ve flown many flights with our trainer to collect image recognition data and ensure avionics robustness.


Interviews & Press
The Team
(click on names for summary)
> Oliver Gent – Team Leader
Oliver led the team throughout the year and pushed development boundaries. He managed objective timelines, motivated the team to progress the project and communicated with stakeholders to report progress and negotiate resources.
- Successful end to end propulsion design using simulation and carrying out wind tunnel testing data to inform efficiency design decisions which was validated with flight testing data. Development of reverse thrust capability to reduce landing distances.
- Designed avionics architechture. Image recognition development alongside Pierre, resulting in successful target recognition at competition. Working alongside Jonathan with Ardupilot resulting in a fully autonomous mission at competition.
- Li-ion batteries were investigated over “traditional” LiPo variants, including significant cell testing to validate performance requirements.
- Increasing composites expertise within Peryton, including using a vacuum bag process and 3d printed moulds to produce a flax composite nose cone.
- Orchestrating flight testing, running 10 testing days total to ensure success at the competition.
- Managing Perytons social media presence including producing videos, total Instagram reel views totalled to 17,000. Co-ordinating team Peryton overall, managing meetings with Peryton Atlantis including organising sponsorship agreements.
- Structural design of the wing/tail connection and the dihedral step joiner.
> Jonathan Foster – Aerodynamics leader
Jonathan led the aerodynamics team with a focus on designing for autonomous flight by building on the flight characteristics and handling of Aria 3, the previous year’s aircraft, which was a key area of improvement. Following from conceptual design of the aircraft, he headed up work on the autopulot, incorporating design features with the autopilot system resulting in a robust, capable and smooth autonomous aircraft.
- Spearheaded stability improvement through incorporating wing and tail dihedral, resulting in a significant improvement in static spiral stability and dynamic modes.
- Developed an innovative design tool in Python to automatically size the tail using a vortex lattice method for aerodynamic stability analysis, which saved significant time and team resource in the conceptual design phase.
- Conducted structural FEA on tail-wing connection and calibrated using real world testing to solve the unique problem of the split V tail configuration. Resulted in a lightweight but stiff connection utilising unidirectional carbon-fibre weave.
- At competition he was responsible for implementing the mission and tuning autopilot parameters, which ensured maximum autonomous performance of the aircraft.
- Experience in Ardupilot carried over from the previous year along with technical breakthroughs before the second competition flight resulted in the only fully autonomous aircraft in the 2022 competition.
> Saurav Tiwari – Structures leader
Working within Team Peryton for the last two years, Saurav has offered his expertise in various fields of UAV design.
- Development of UAV initial sizing strategies. The conceptual sizing of lifting surfaces using constraints and requirements analysis.
- Development of flight envelop of the UAV. Identification and Evaluation of critical worst-case loadings of the UAV.
- Worked on the development of a code for calculating the drag.
- Conducted structural design of the wing including CAD and FEA. Significant effort on the wing/tail connection FEA analysis.
- Worked on the development of sub-teams interface identification and management.
> Panayiotis Vyronos – Case leader
The main area of focus for Panos revolved around the payload delivery system. A significant amount of time was also invested in developing and building the UAV case. Being involved in the project has provided him an opportunity to learn about UAV systems and picking up valuable engineering skills and knowledge. Panos is now perusing new career paths in the UAV industry as a result of the experience.
> Pierre Semichon
Pierre developed the image recognition software, in particular the clustering functionality to remove false positives and increase final position estimation.
> Owen Wastell
Owen is a returning member of the 2021 Peryton team. He led the mass tracking within project management. He was also part of the aerodynamics teams for the wing and the structural team for the tail. Team Peryton has been a huge part of his life for the past 2 years. The relationships generated and lessons learnt over that time will be taken with him for the rest of his life.
> Thanraj Virdee
Thanraj is a second-year aerospace engineering student, throughout the course of the year he assisted in the design, manufacture, and testing of the aircraft, helping the team wherever necessary. “This has been a truly amazing experience which has made me more passionate than ever about UAS and I am grateful to the team and the IMechE for this opportunity.”
> Schuyler Goodwin-Groen
Schuyler contributed to the design of the payload bay, fuselage, and wind tunnel testing the propulsion system. He brought expertise in CNC machining, using his custom-built machine, enabling the team to manufacture precise foam fairings. He also assisted in manufacturing the wings, payload bay, nose cone, gaining experience in composite techniques.
> Aiden Wood – Composites
Aiden served as the composites engineer for the team where he helped manufacture the nose cone mould with 3d printing. He promoted the use of flax composite in the project and helped produce a nosecone through the use of wet layup and vacuum bagging.
Luke Bowden, Sam Edmunds, Artie Knijff, Nicholas Siu
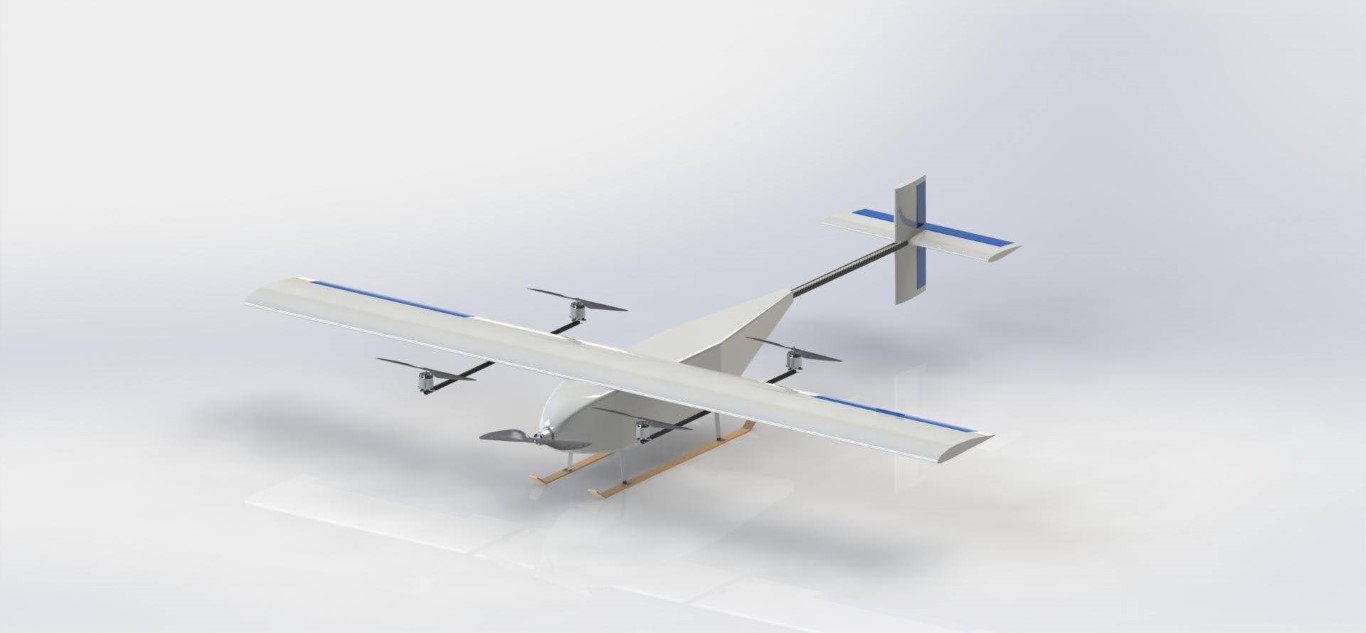
2022 Team Peryton Atlantis
We are the third-year team and this will be our first year participating in the UAS Challenge. Our team consists of Aerospace Engineering students and one Mechanical Engineering student. We also have team members returning from industrial placements, bringing with them a plethora of knowledge to apply to this competition. We are keen to demonstrate our engineering abilities and creative thinking which is why we are developing a VTOL aircraft for this year’s competition.
- Our aircraft is equipped with 5 motors: 4 dedicated lift motors and 1 tractor motor
- Our design is capable of vertical flight and hovering with the aim of maximising payload drop accuracy
- Our aircraft will also have a fixed-wing enabling more power-efficient transit between tasks whilst minimising mission time
- We have incorporated the payload inside the fuselage of our aircraft to maximise aerodynamic efficiency
- We will be using carbon fibre composites to construct the weight-efficient skeleton of our aircraft
Interviews & Press
We’re Working With

![]()
Sponsors


![]()
if you’re interested in what we do, please contact teamperyton@surrey.ac.uk!
Previous entries
2021 Aria, Grand Champion 2021
Aria’s ideology from planning through to testing focused on producing an aircraft capable of winning the competition whilst keeping complexity low. 9 testing days were carried out to ensure the aircraft would perform as expected on the day, going through several design iterations during this process. The team faced many challenges with COVID restrictions but managed to reach their ambitions none the less.


Interviews & Press
The Team
- Oliver Gent - Team Leader
- Jonathan Foster - Avionics Lead
- Saurav Tiwari - Lift Generation Lead
- William Harper - Manufacturing & Test Lead
- Luke Middlemass - Propulsion Lead
- Owen Wastell
- Jose Arabelo Romero
- Ryan Hewitt
- Artie Knijff
- Wiktor Kawala
- Ferran Prat
- Hasan Sacrine
- Tayyib Islam
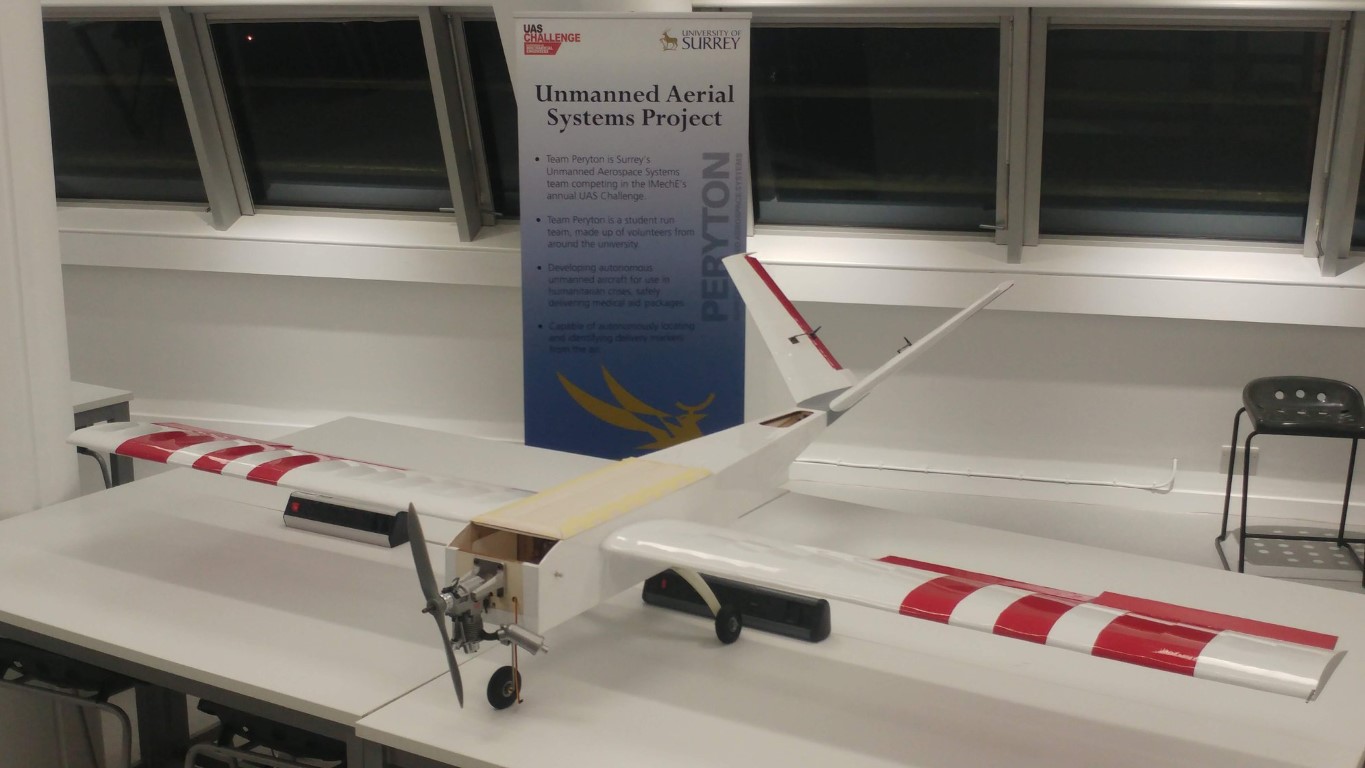
2021 Dragonfly
The 4th year volunteer team aircraft, designed to be very efficient with tapered high aspect ratio wings and T tail. Innovative use of custom composites to make a structurally light tail boom attachment.

2020 Wally
4th year volunteer team building on the 2019 3rd year group project learning, focusing on producing an easy to manufacture design. Powered by an internal combustion engine and developing the solarfilm/balsa based wing structure which inspired Arias’ wing design. Unfortunately it was unable to enter competition or flight test due to COVID.
2020 Flying Wing
3rd year design project not entered into the IMeche UAS challenge. Developed manufacturing jigs to ease assembly and used custom carbon fibre wrapping to provide an efficient carbon frame.

2019 Flop
I have questions.

2018 Sparky
First Peryton entry to go to competition! Sparky used a CNC’d carbon fibre and aluminium honeycomb sandwich panel to provide an extremely light and stiff frame.

2017 Hudson
First Team Peryton IMechE UAS Challenge entry, designed to use a launcher to save mass on landing gear and propulsion weight. 3 meter high aspect ratio wing ensured high aerodynamic efficiency.
